-

-
苏州虔坤图像技术有限公司
-
15950935420
热门搜索:



3D相机线激光传感器技术原理(二):采取三角测量法的激光位移传感器比较高线性度可达1um,分辨率更是可达到。比如ZLDS100类型的传感器,它可以达到,,石家庄工业3D相机评测,,适应恶劣环境。激光位移传感器采用回波分析原理来测量距离以达到一定程度的精度。传感器内部是由处理器单元、回波处理单元、激光发射器,石家庄工业3D相机评测、激光接收器等部分组成,石家庄工业3D相机评测。激光位移传感器通过激光发射器每秒发射一百万个激光脉冲到检测物并返回至接收器,处理器计算激光脉冲遇到检测物并返回至接收器所需的时间,以此计算出距离值,该输出值是将上千次的测量结果进行的平均输出。即所谓的脉冲时间法测量的。激光回波分析法适合于长距离检测,但测量精度相对于激光三角测量法要低,由此远检测距离可达250m。 Gocator三维智能传感器在锂电池缺陷检测的应用。石家庄工业3D相机评测
行业现状:采用传统的二维图像识解决方案无法用于轮胎DOT检测因为黑色的凹凸的字符在同样黑色的轮胎上,导致对比度为零,而且解决轮胎表面高吸光的特性也是有难度的。采用人工核对方式,存在耗时长、精细度差、易遗漏等问题,同时因非常时期影响,人工检测很多时候无法有序开展。但是对于3D检测来说,能够建立在2D检测的基础之上,提取出字符的三维信息,将自动采集轮胎信息,交由给软件处理,能够更加大部分的做出分析与判断。使用3D相机可以提高检测速度和准确度。宁德Gocator24103D相机角度一起感受Gocator三维智能传感器的魅力。
3D相机照射的原理:一般3D立体相机采用的基本原理是光学三角法:半导体激光器①被镜片②聚焦到被测物体⑥。反射光被镜片③收集,投射到CMOS阵列④上;信号处理器⑤通过三角函数计算阵列④上的光点位置得到距物体的距离。按照测量原理,激光位移传感器分为激光三角测量法和激光回波分析法,激光三角测量法一般适用于高精度、短距离的测量,而激光回波分析法则用于远距离测量,下面分别介绍激光三角测量原理和激光回波分析原理。1.激光位移传感器原理之激光三角测量法原理激光发射器通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出激光位移传感器和被测物体之间的距离。
在自动焊应用中,机器人经过精密编程以遵循焊接路径,其中焊炬位置和焊炬角度根据工件设置上的狭窄机械公差*。 高质量的焊接,必须防止工件和夹具出现任何机械偏差,并且所有焊缝位置必须 ** 准确。 这种方法主要是满足长时间生产高质量焊缝所需的严格公差。工作流程传感器前置于焊接头,提前检测焊缝左右偏移和高低偏移,并将焊缝走向实时传递到焊枪控制单元,完成各种复杂焊接,避免焊接质量偏差,实现无人化焊接。传感器本体到工件的距离也就是安装高度取决于所安装的传感器型号。当焊枪在焊缝上方正确的定位后,焊缝应该接近条纹的中心,这才能使得摄像机观察到激光条纹和焊缝。LMI Gocator 3100系列一体式三维智能传感器。
Gocator 2400系列:
**高分辨率3D激光线轮廓传感器 Gocator 2400传感器设计用于100%检查具有挑战性的目标,例如小型电子部件上的微观特征,以及高速在线应用中的深色材料,如轮胎胎面/侧壁和橡胶板。 200万像素成像仪。每个配置文件分辨率高达1940点视场(FOV)高达194 mm测量范围高达210 mm
概要参数 型号24102420X方向分辨率 (mm)0.00580.014Z方向分辨率 (mm)0.00110.0018视野 (mm)10-1027-32间隙距离 (mm)19.060.0测量范围 (mm)625激光蓝色蓝色 您还可以使用点云Blob工具从3D高度图数据中提取Blob。烟台Gocator26503D相机矫正
LMI 视觉3D相机软件下载。石家庄工业3D相机评测
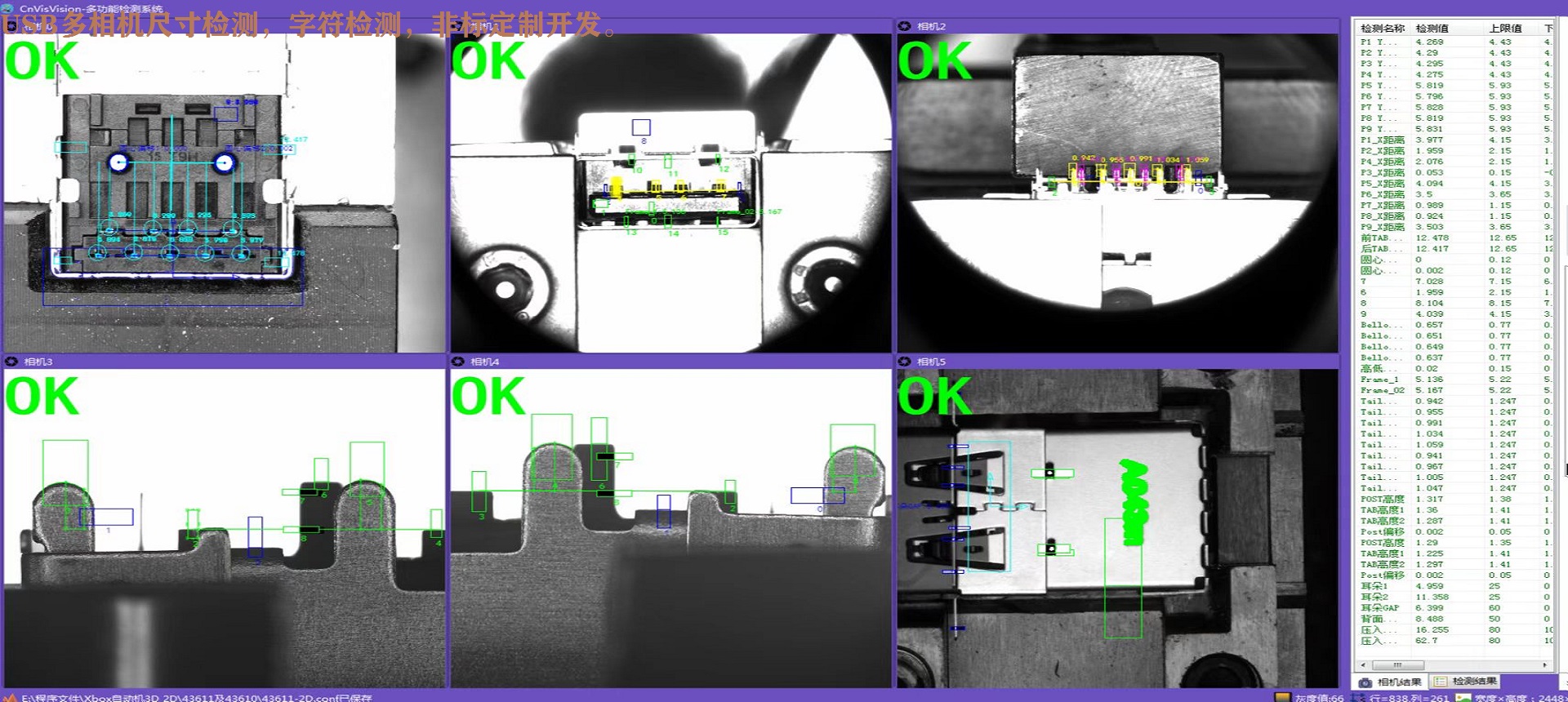
光学影像筛选机分为标准机和非标机,标准机主要是紧固件玻璃筛选机,如市面上比较**的东莞瑞科,岳一科技等公司,熟称玻璃筛选机,因为旋转的平台是一个类似餐厅的餐桌旋转玻璃。标准机的优势是成本可以做的非常低,结构相对简单,也主要用于紧固件筛选,通常使用振动盘送料,通常单独使用。而非标机通常用于组装检测包装全过程,常用于手机电脑的接插件,这类产品都带有PIN针,通常无法用玻璃盘筛选机用振动盘的方式送料,而是和组装焊接制程有效连接在一起,并用载带包装盘包装出货。我司正是擅长于此类非标检测包装机,可以同时2D尺寸检测+3D相机检测pin针高度检测,打标及包装。下面讲讲玻璃筛选机的定义:螺丝光学影像筛选设备(螺丝全自动流水线自动检测设备)利用的是可见物体视觉探测原理而形成。光学影像筛选设备使用工业照相机将被检测的目标转换成图像信号。根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征。如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、个数。 石家庄工业3D相机评测
苏州虔坤图像技术有限公司是一家苏州虔坤图像技术有限公司成立于2022年06月30日,注册地位于昆山市周市镇伟翰路299号4号房,法定代表人为谭建文。经营范围包括一般项目:技术服务、技术开发、技术咨询、技术交流、技术转让、技术推广;光学仪器制造;机械设备研发;工业自动控制系统装置制造;智能基础制造装备制造;仪器仪表制造;电子测量仪器制造;模具制造;机械零件、零部件加工;光学玻璃制造;通用零部件制造;计算机软硬件及外围设备制造;机械零件、零部件销售;模具销售;电子产品销售;光学仪器销售;机械设备销售;电子元器件批发;工业自动控制系统装置销售;软件销售;软件开发;人工智能基础软件开发;工业机器人制造;仪器仪表销售;计算机软硬件及辅助设备批发(除依法须经批准的项目外,凭营业执照依法自主开展经营活动)的公司,致力于发展为创新务实、诚实可信的企业。公司自创立以来,投身于工业相机,镜头,光源,机器视觉系统集成,是电子元器件的主力军。虔坤图像致力于把技术上的创新展现成对用户产品上的贴心,为用户带来良好体验。虔坤图像始终关注自身,在风云变化的时代,对自身的建设毫不懈怠,高度的专注与执着使虔坤图像在行业的从容而自信。